
Posted 5/28/15
A while back I posted that I had purchased a new 4WD robot platform from DFRobot (http://www.dfrobot.com/), and it came in while I was away at a bridge tournament. So, yesterday I decided to put it together and see how it compared to my existing ‘Wall-E’ wall-following platform.
The chassis came in a nice cardboard box with everything arranged neatly, and LOTS of assembly hardware. Fortunately, it also came with a decent instruction manual, although truthfully it wasn’t entirely necessary – there aren’t that many ways all the parts could be assembled ;-). I had also purchased the companion ‘Romeo’ motor controller/system controller from DF Robot, and I’m glad I did. Not only does the Romeo combine the features of an Arduino Leonardo with a motor controller capable of 4-wheel motor control, but the Pirate chassis came with pre-drilled holes for the Romeo and a set of 4 mounting stand-offs – Nice!
So, at this point I have the chassis assembled, but I haven’t quite figured out my next steps. In order to use either the XV-11 or PulsedLight LIDAR units, I need to do some additional groundwork. For the XV-11, I have to figure out how to communicate between the Teensy 2.0 processor and whatever upstream processor I’m using (Arduino Uno on Wall-E, or Arduino Leonardo/Romeo on the Pirate). For the LIDAR-Lite unit, I have to complete the development of a speed-controlled motor drive for rotating the LIDAR. Stay tuned!
Frank
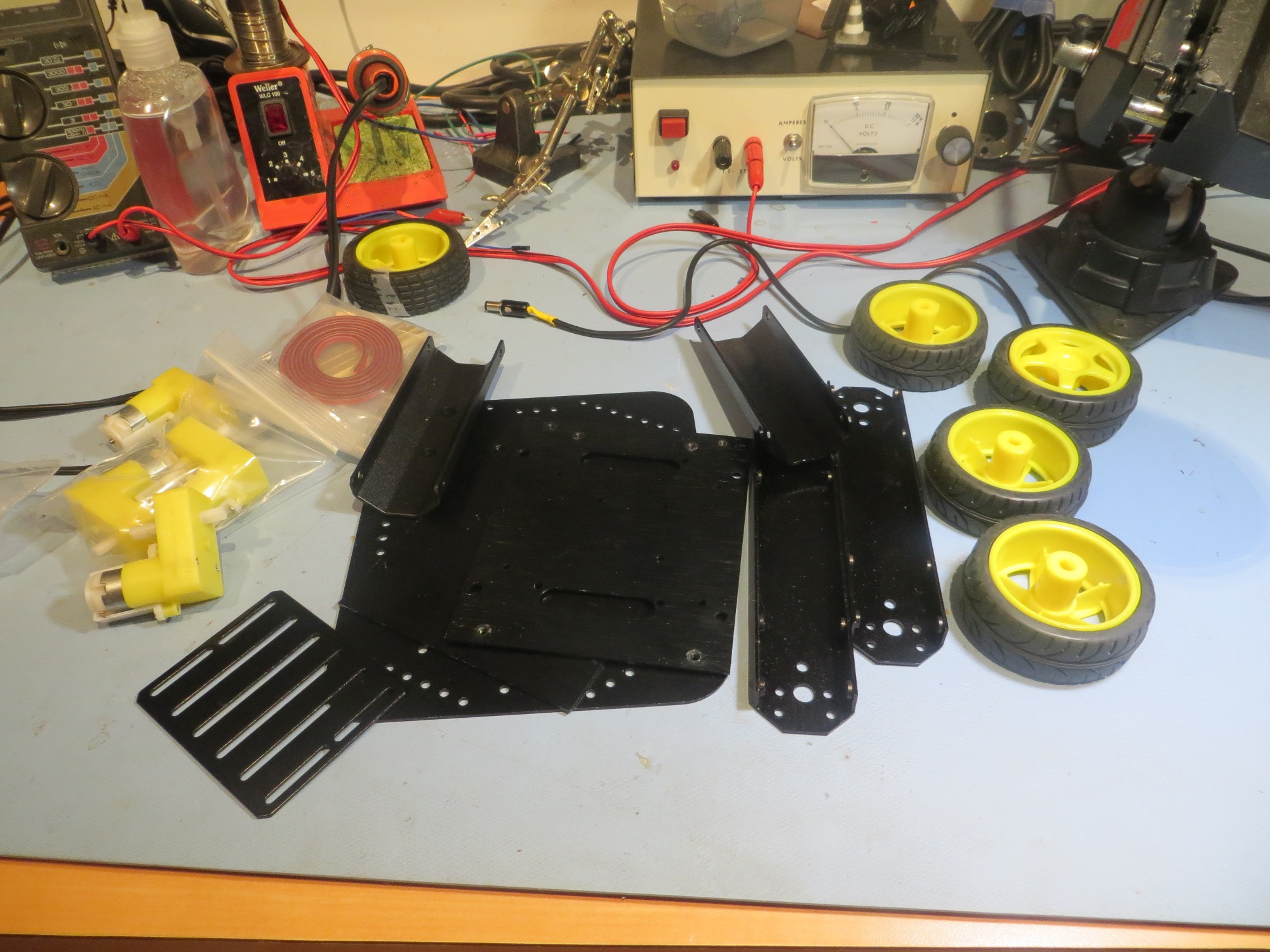
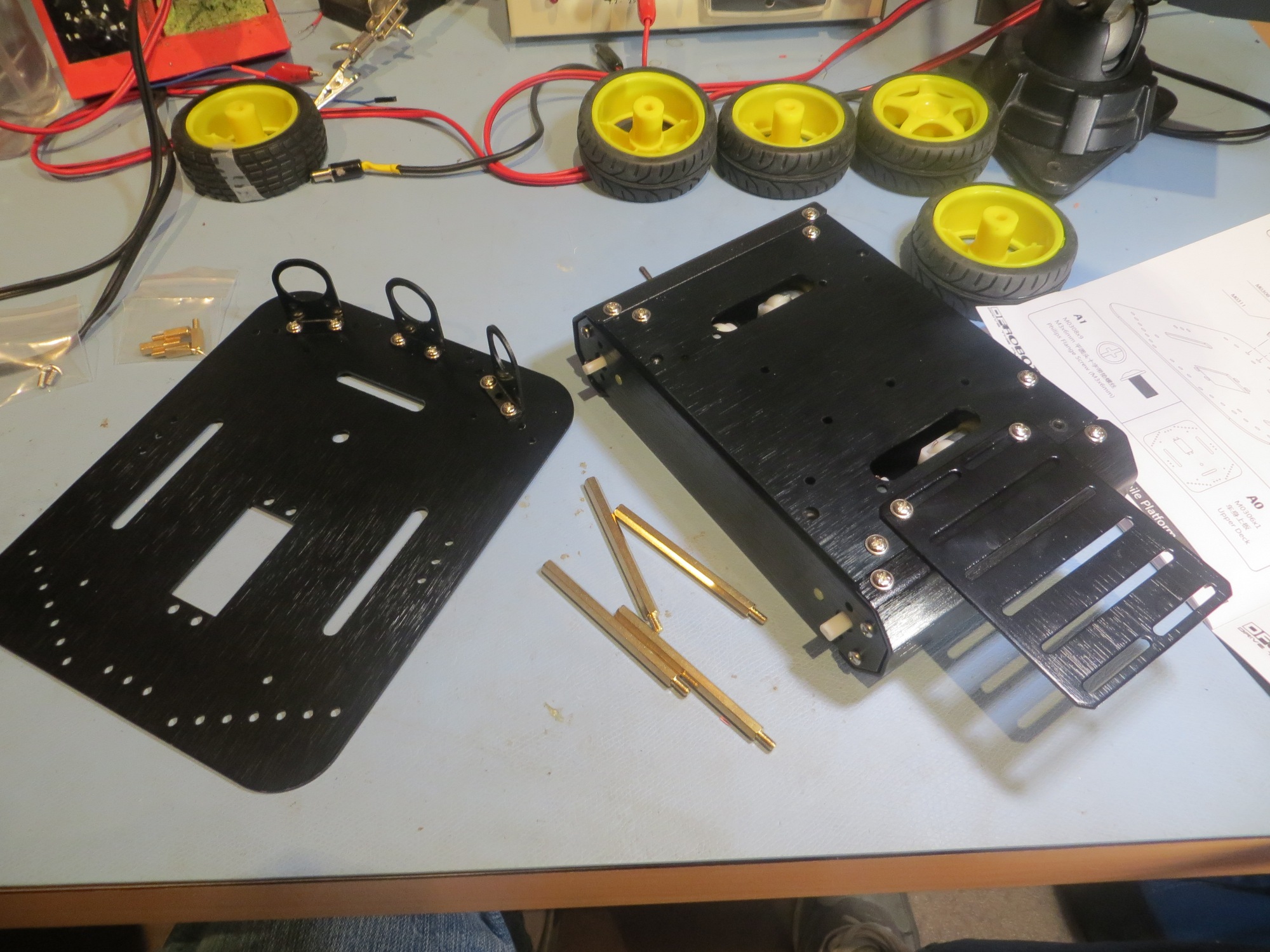
Parts, parts, and more parts!
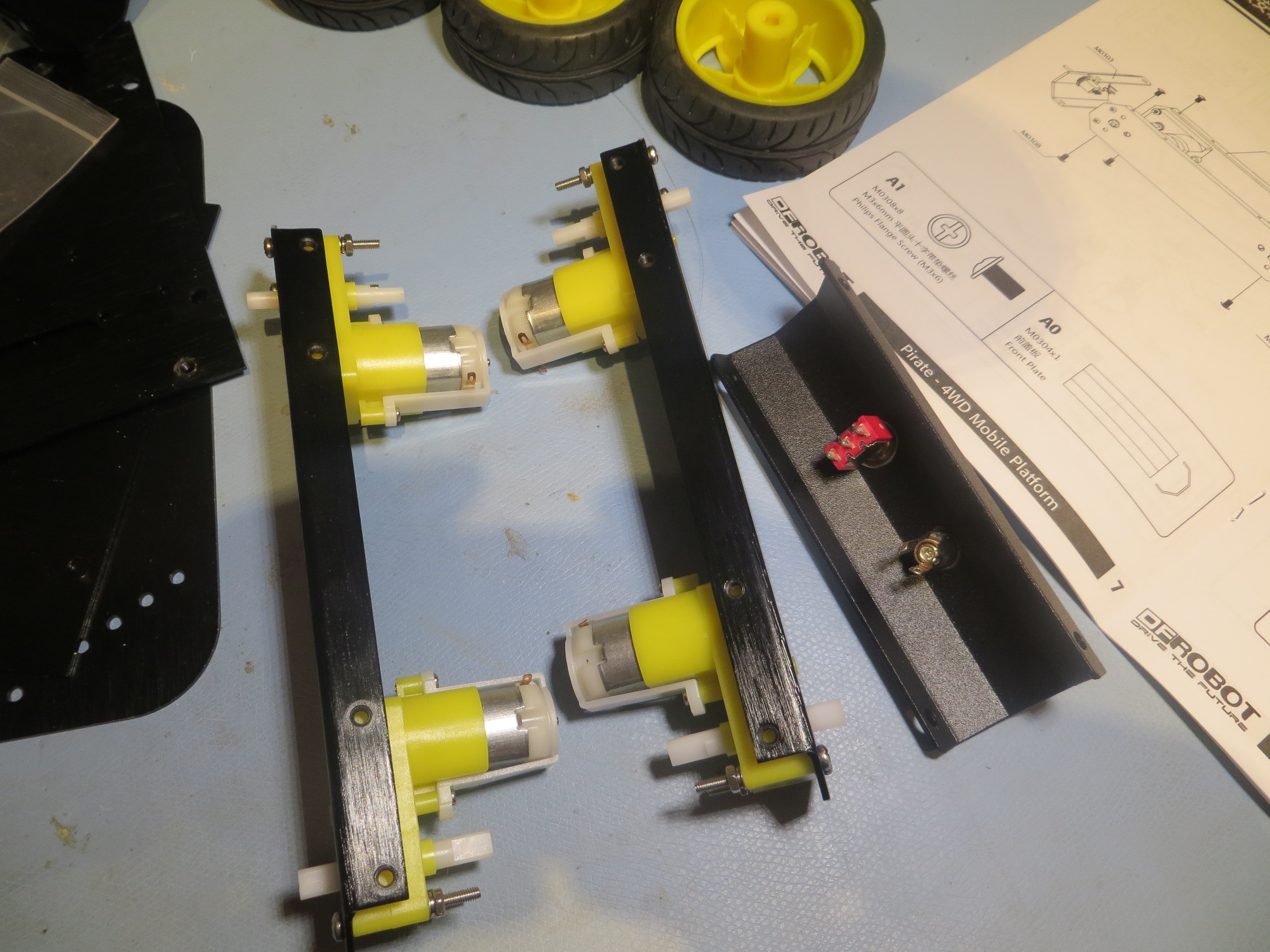
Motors installed in side plates
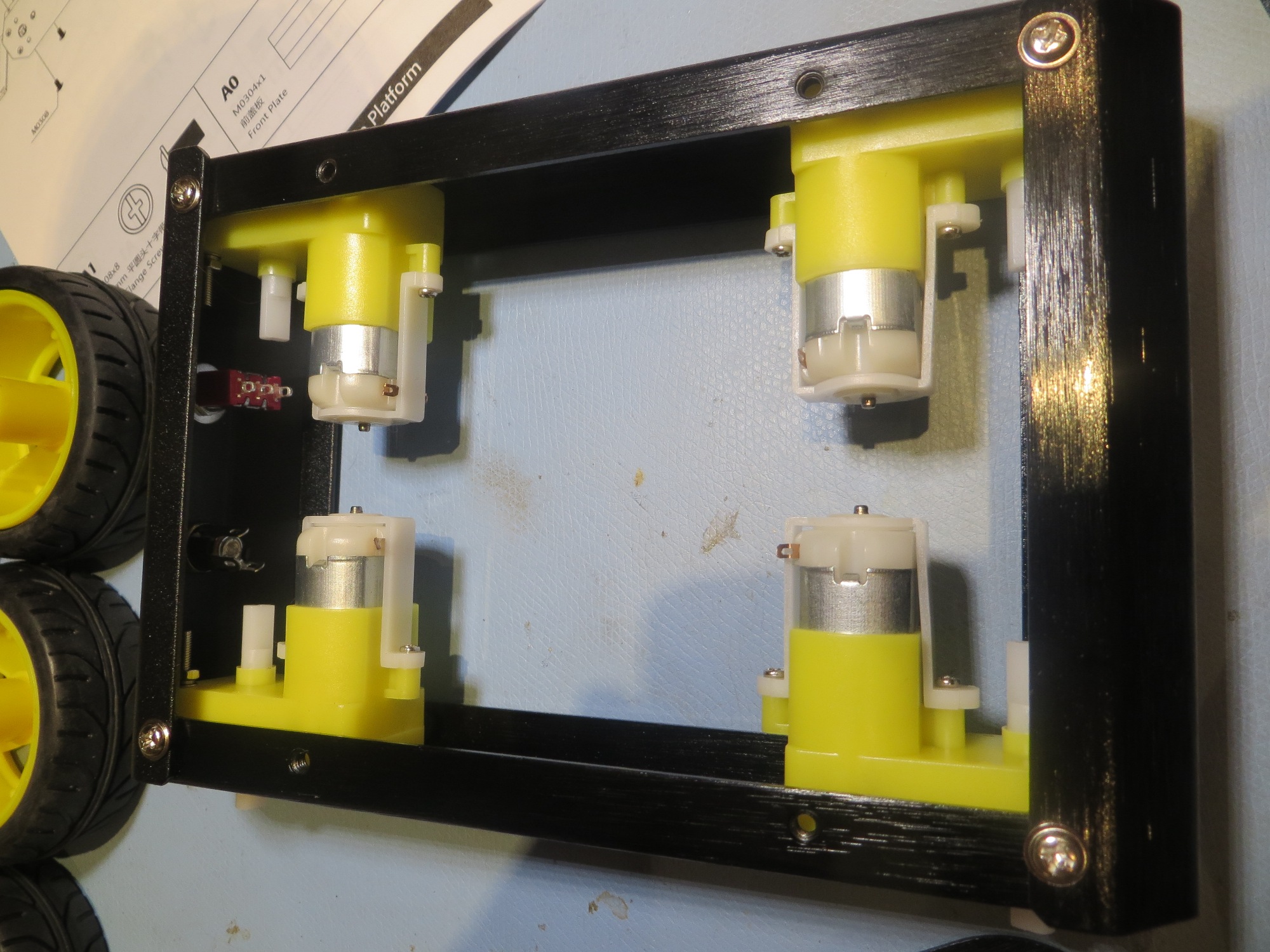
Side plates and front/back rails assembled
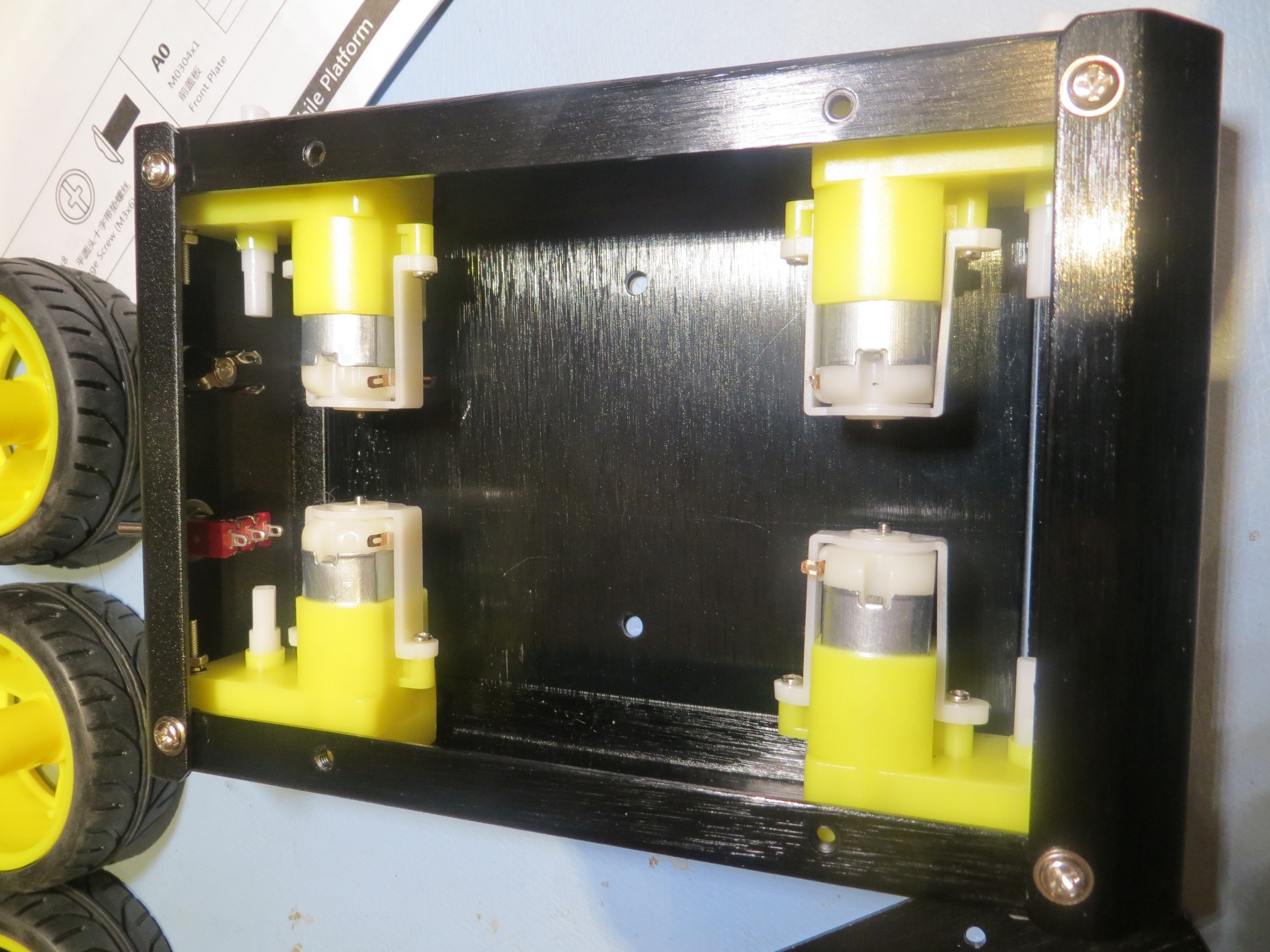
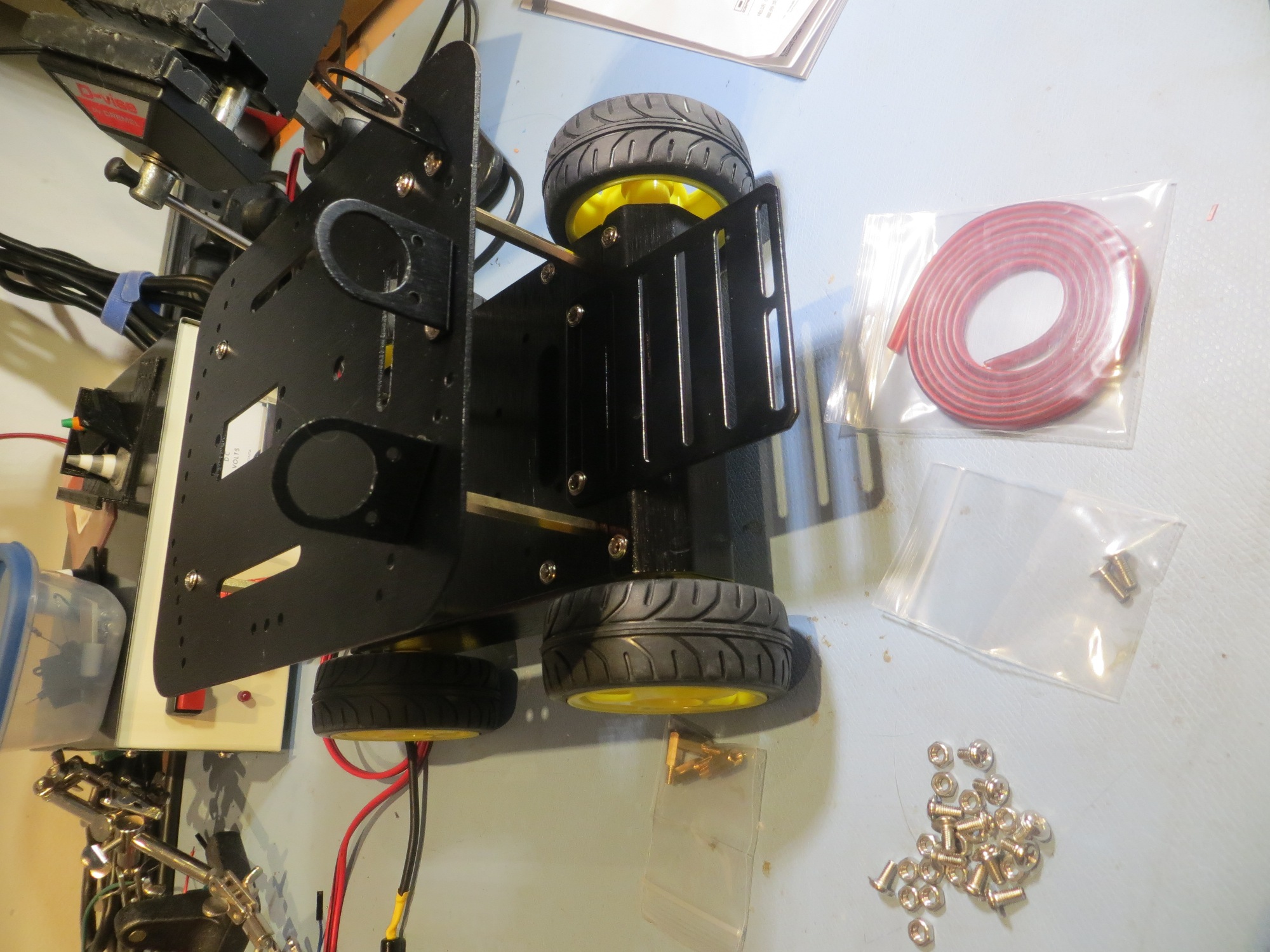
Bottom plate added
Getting ready to add the second deck
Assembled ‘Pirate’ chassis
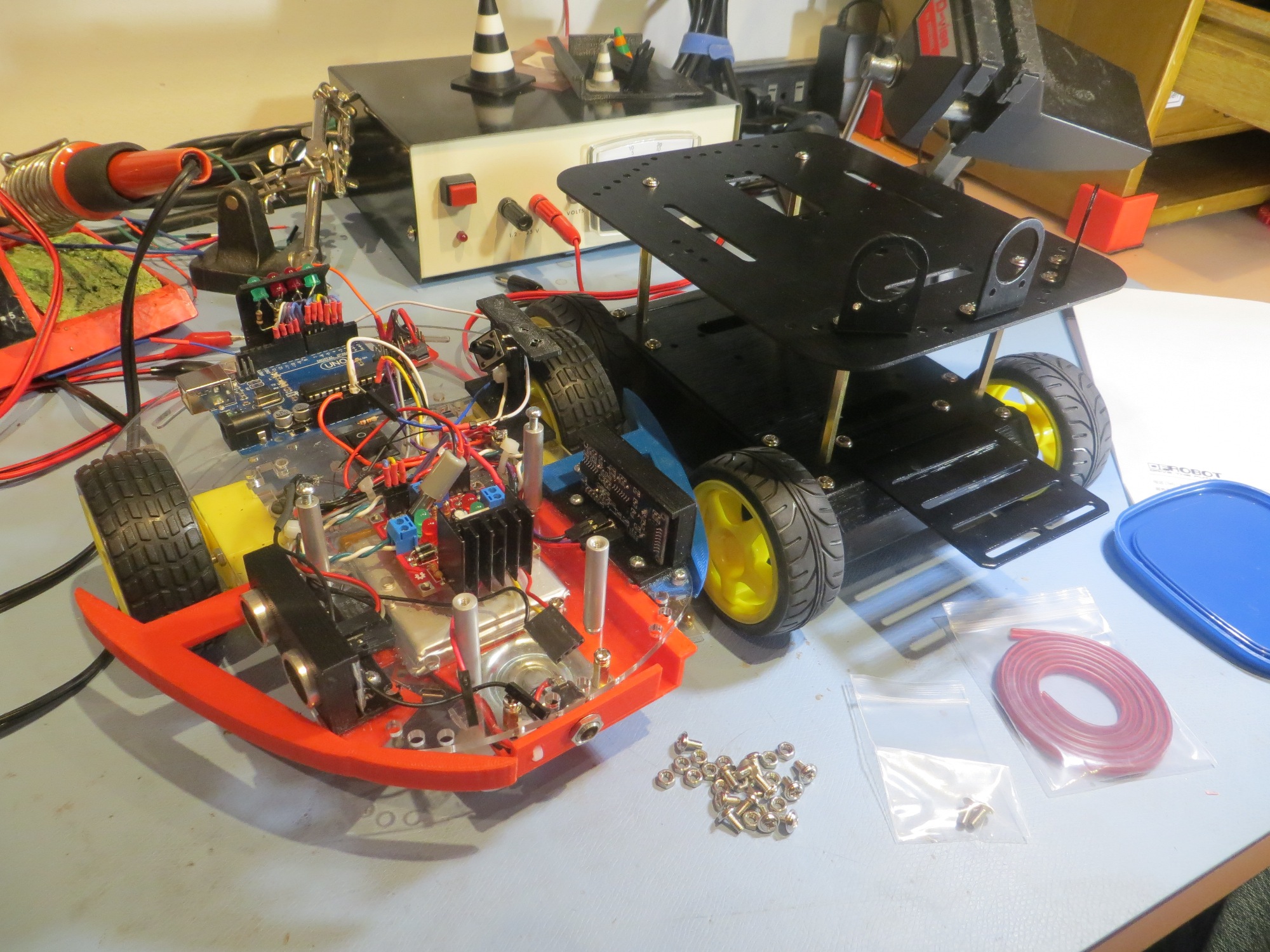
Side-by-side comparison of Wall-E platform with Pirate 4WD chassis
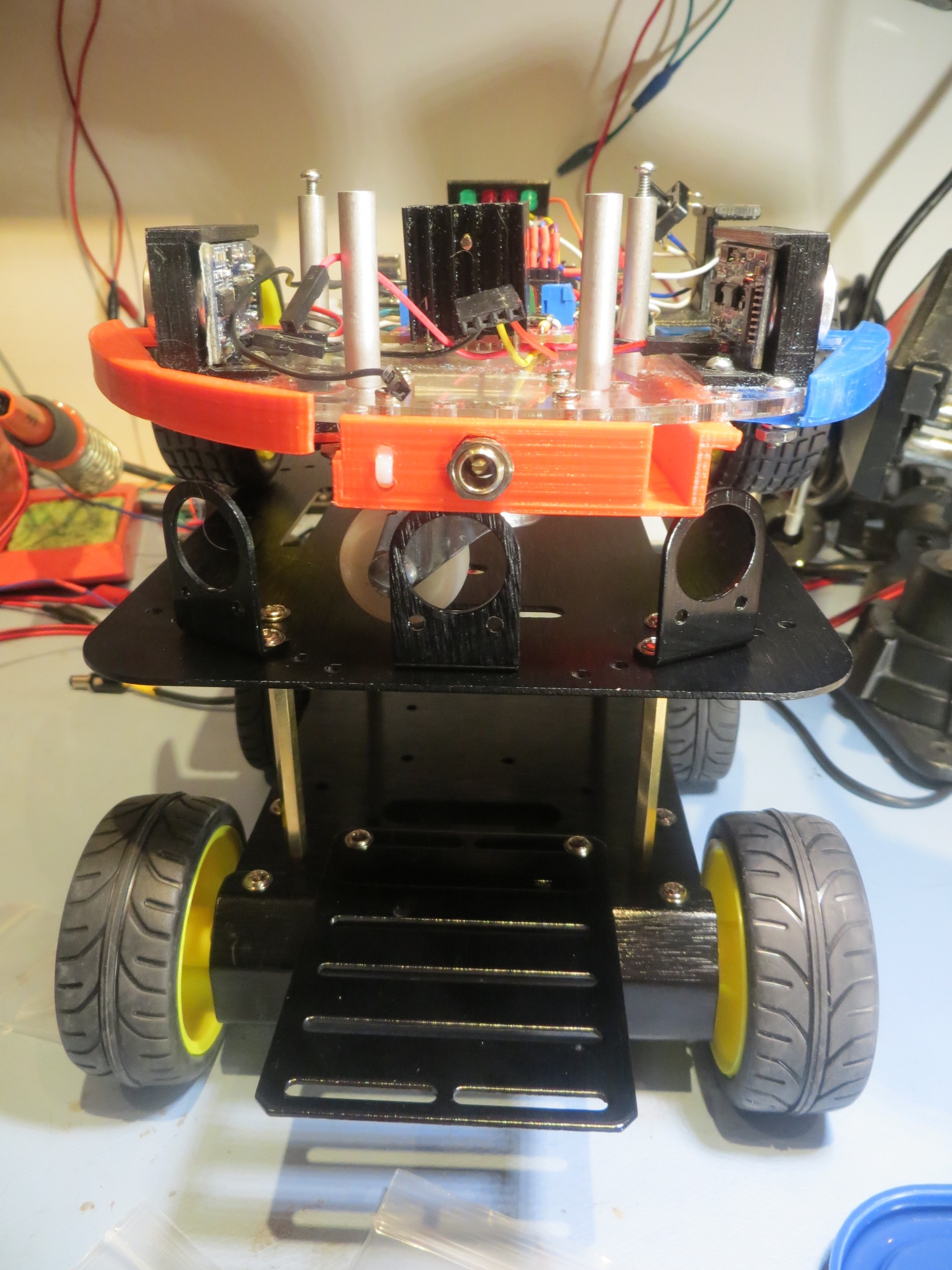
Over-and-under comparison of Wall-E platform with Pirate 4WD chassis
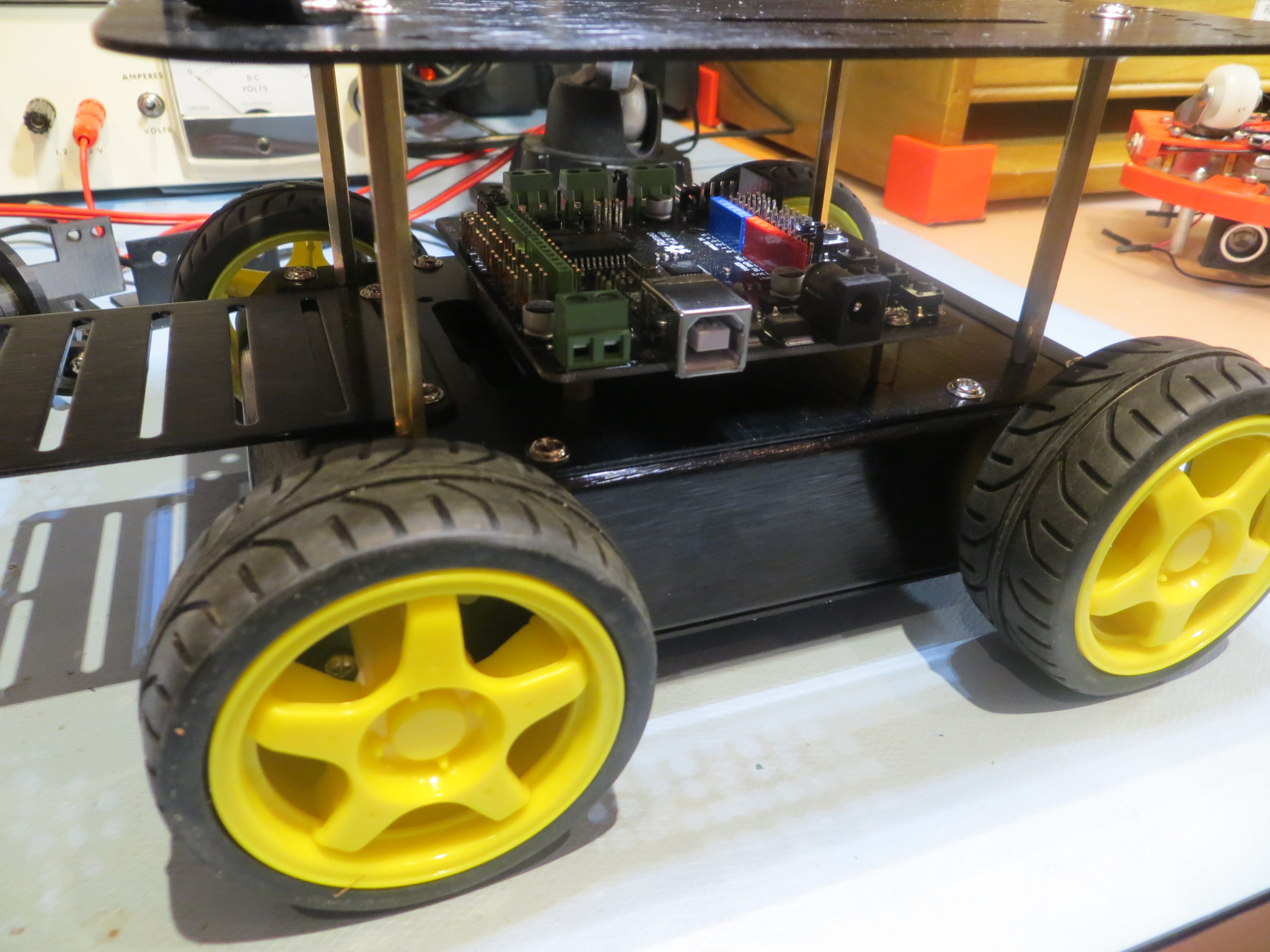
Optional ‘Romeo’ motor controller board. Holes for this were pre-drilled in the Pirate chassis, and mounting stand-offs were provided – Nice!