Posted 03/30/15:
Now that the robot is starting to achieve real wall following more times than not, I’ve decided to address a serious robot personality issue; my robot loves chair legs! If Wall-E gets within a meter or so of any chair in the house, it immediately hugs one leg between one side or the other of the chassis and that side’s wheel. This causes the robot to go around and around the chair leg (or just spin it’s wheels in place), basically forever. As you might understand, this is less than optimal performance from my point of view, regardless of Wall-E’s obsession with chair legs.
So, I’ve decided that Wall-E needs a bumper or fairing to keep chair legs from getting caught between the chassis and a wheel, as shown in the following photos and video.
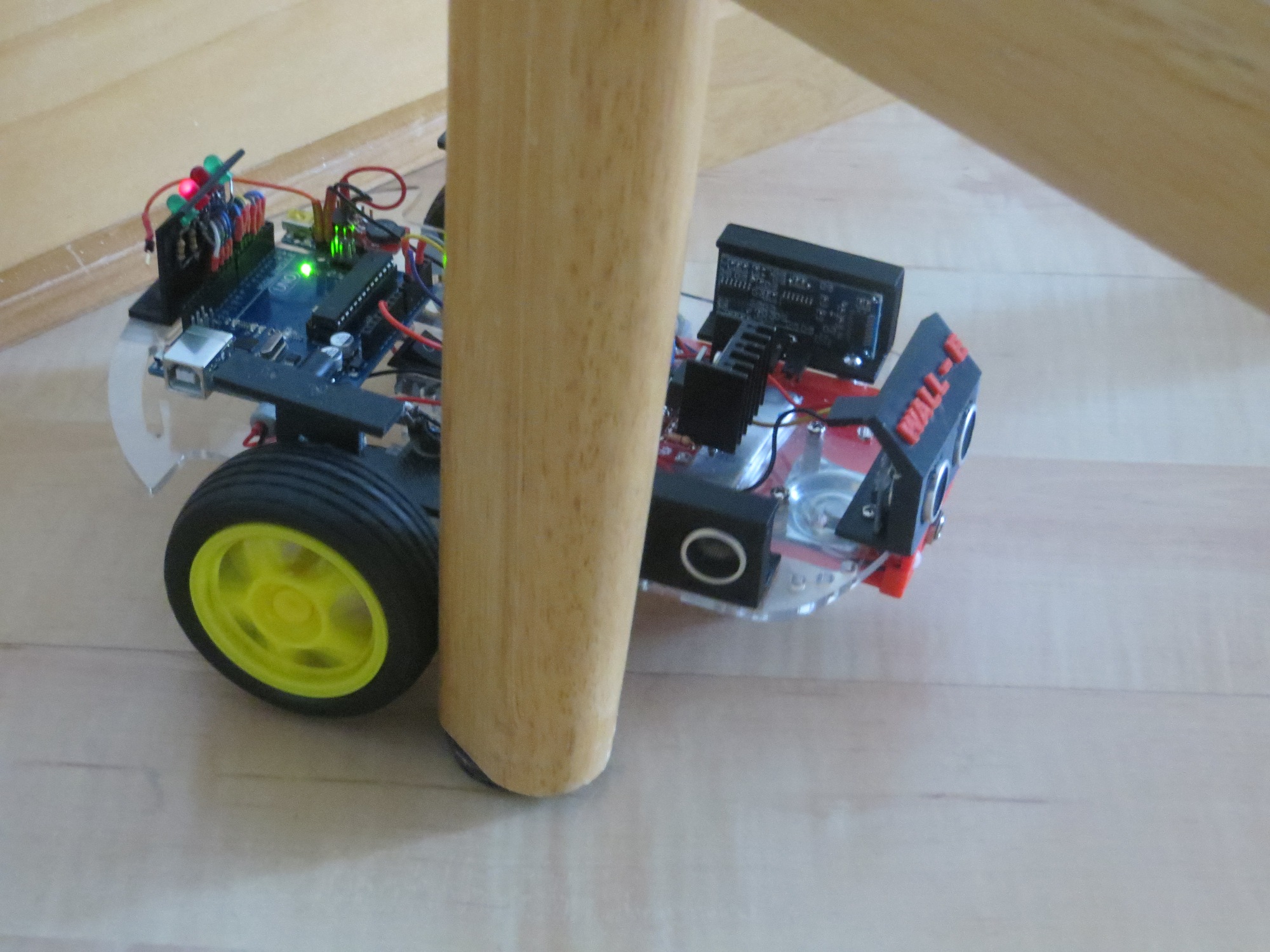
Wall-E stuck on a chair leg. Note the blurring of the wheel spokes as Wall-E churns away to no effect!
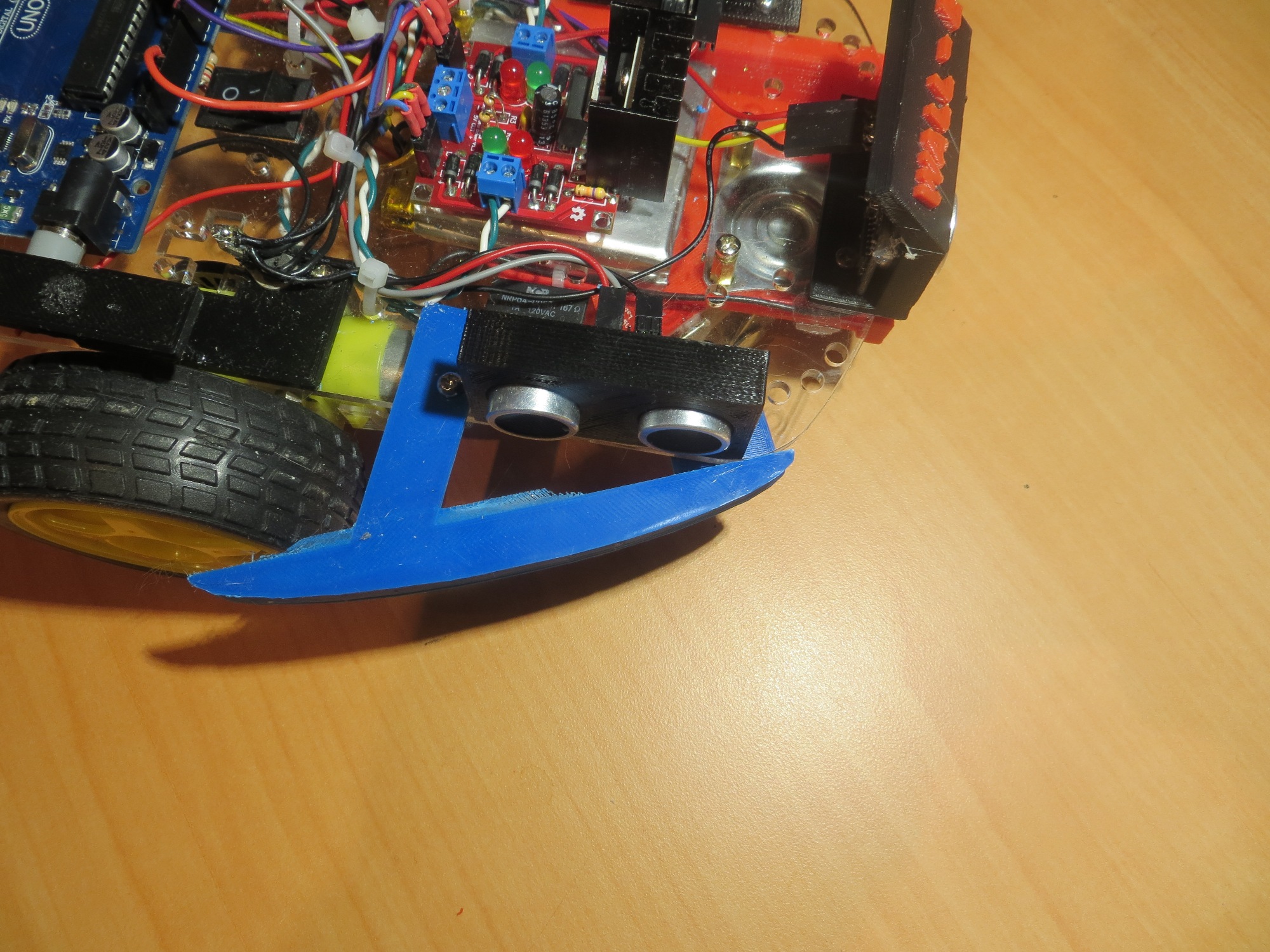
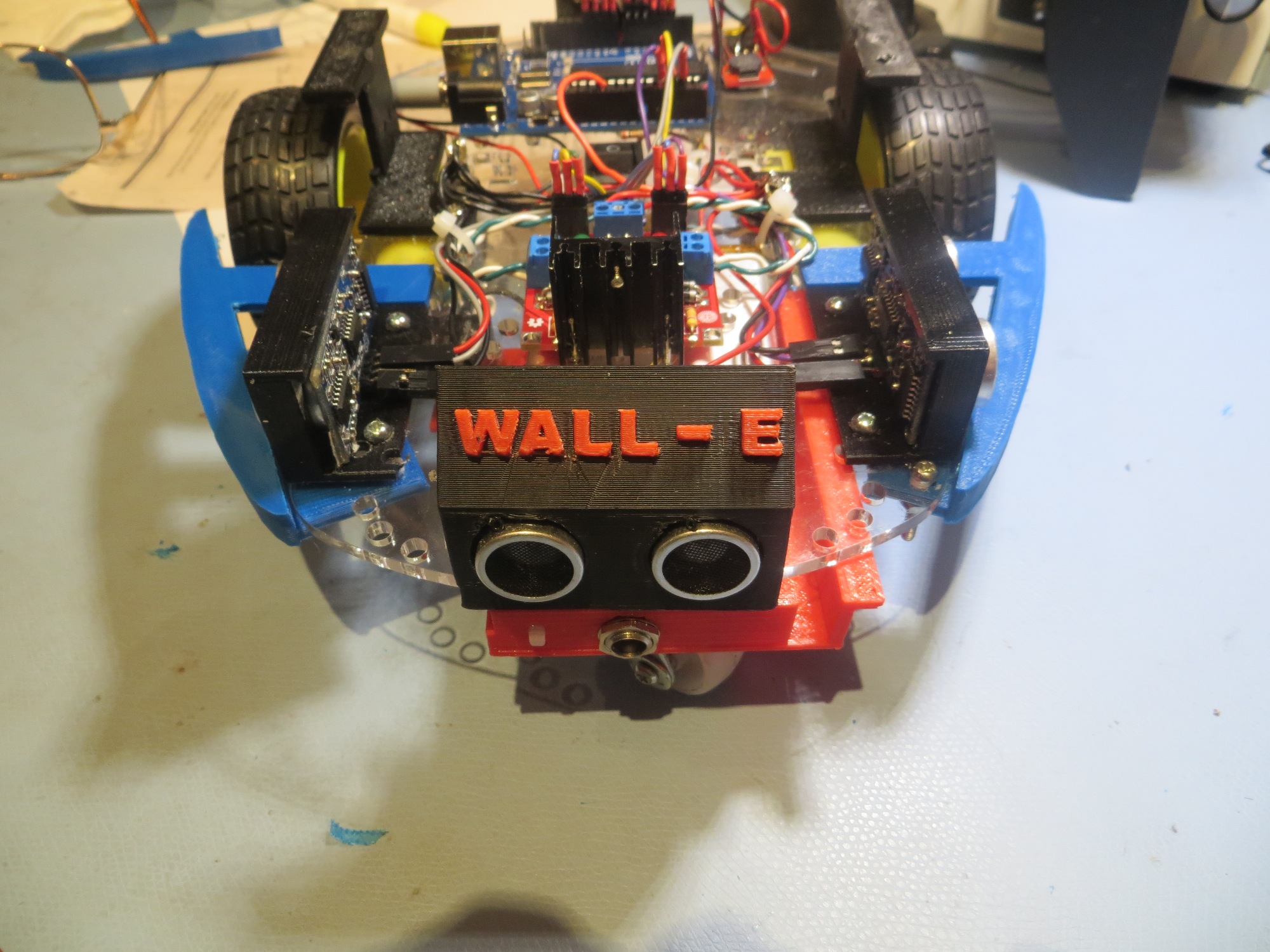
So, after some quality time in TinkerCad (and one failed version), I came up with a bumper design that doesn’t interfere with the current left/right ping sensor mounting, and seems to keep Wall-E from getting stuck on chair legs. The photos below show the right side bumper – the left side is a simple mirror image.
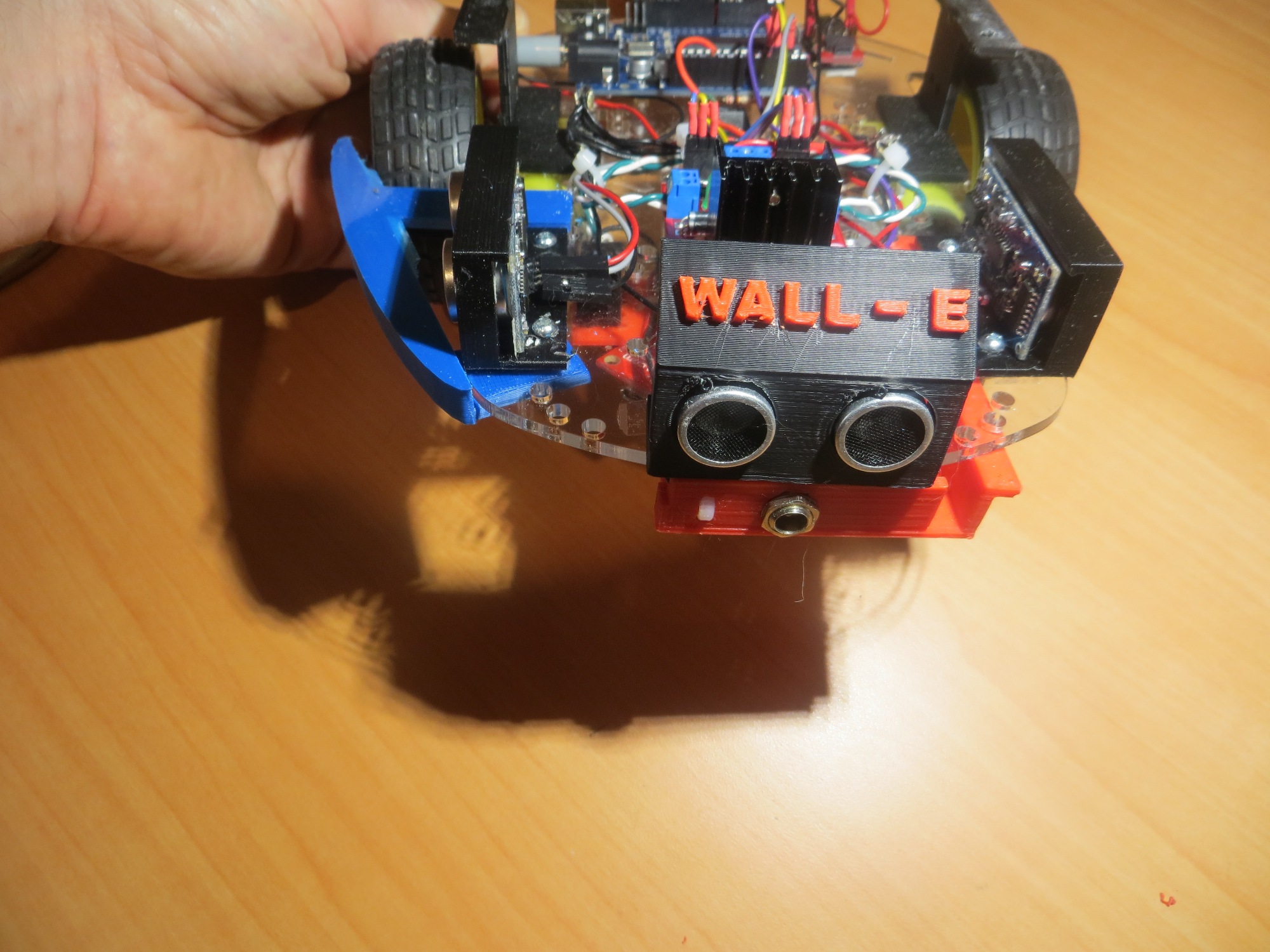
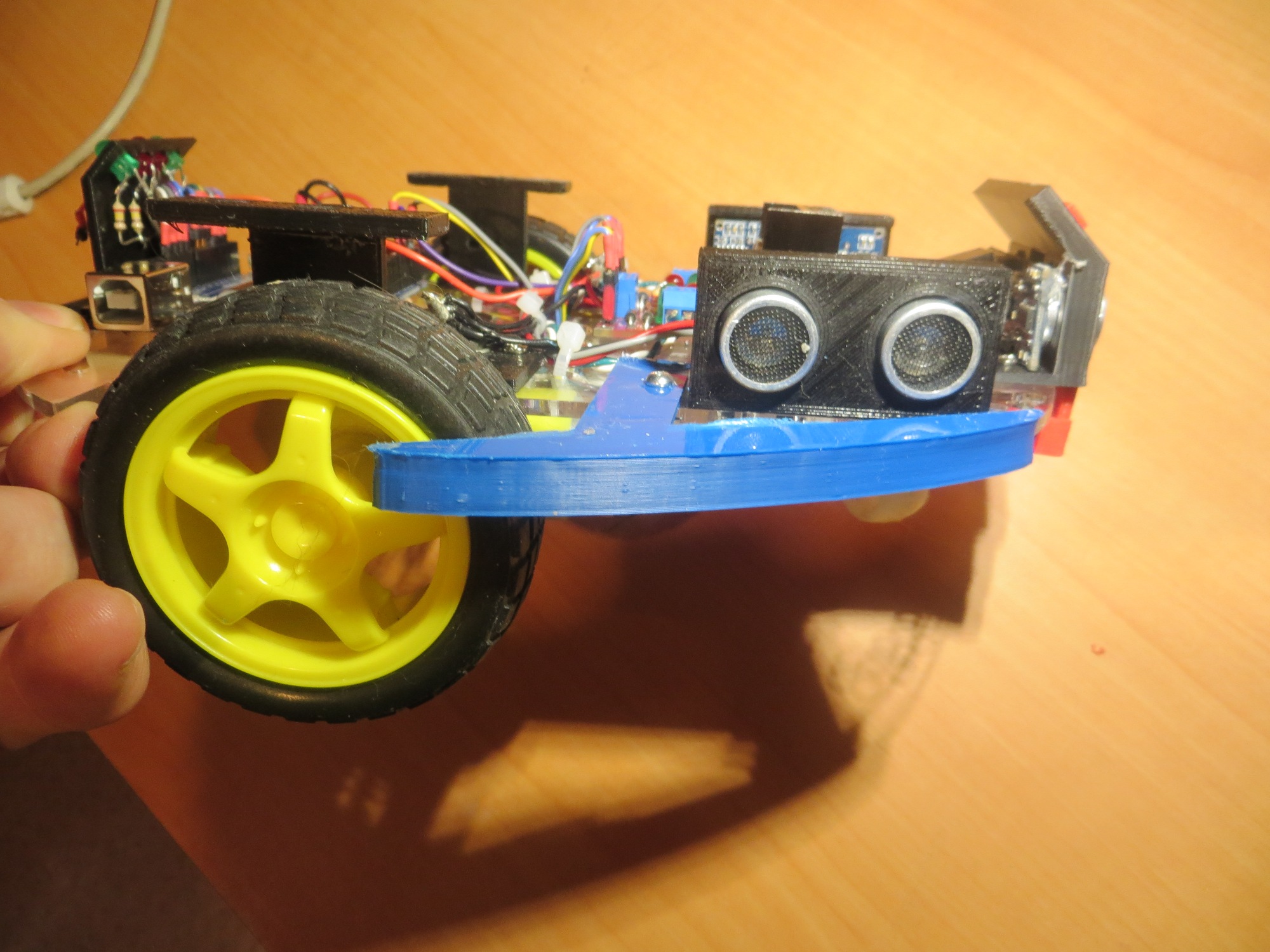
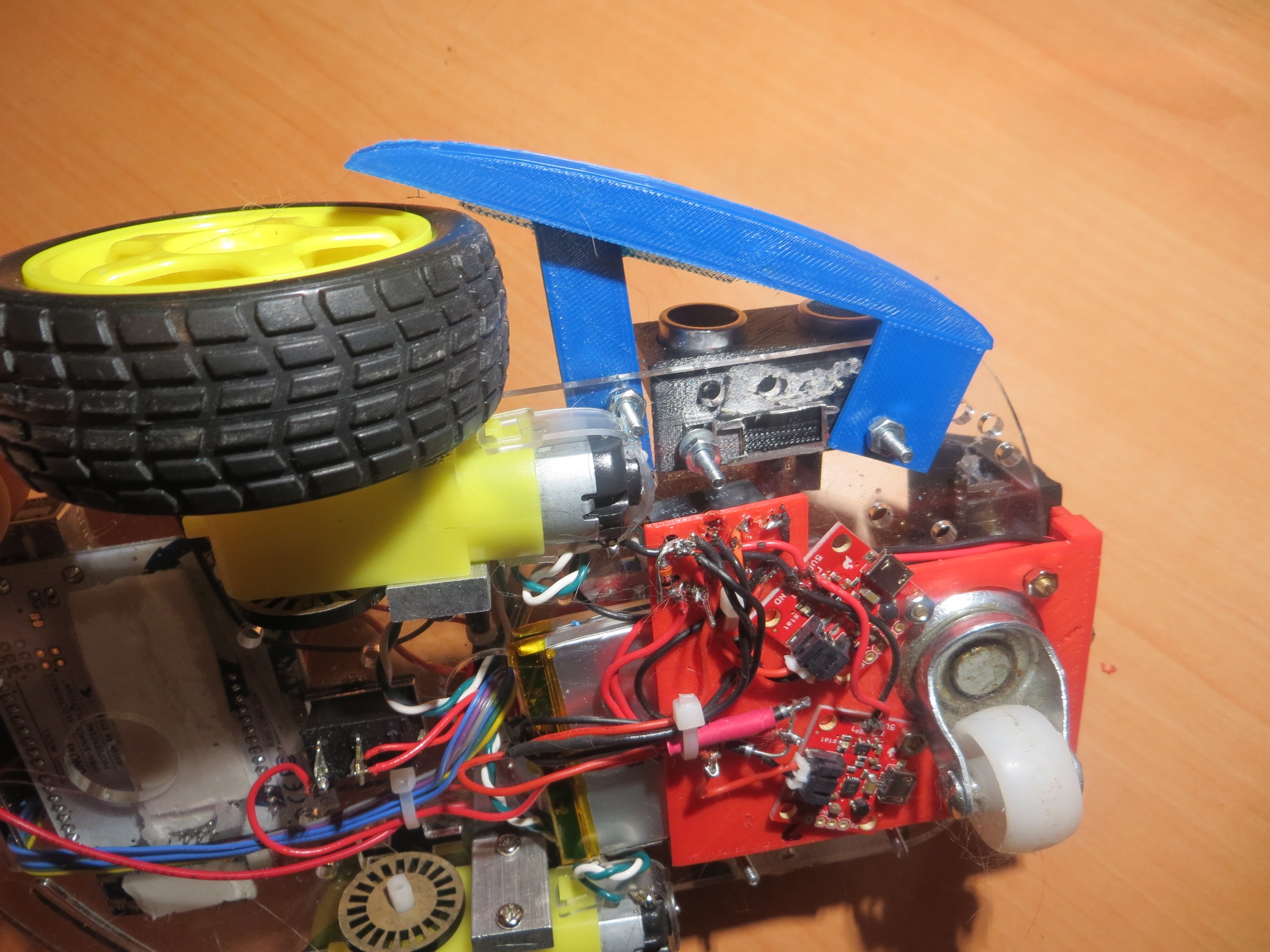
Front oblique view of Baby’s new bumpers
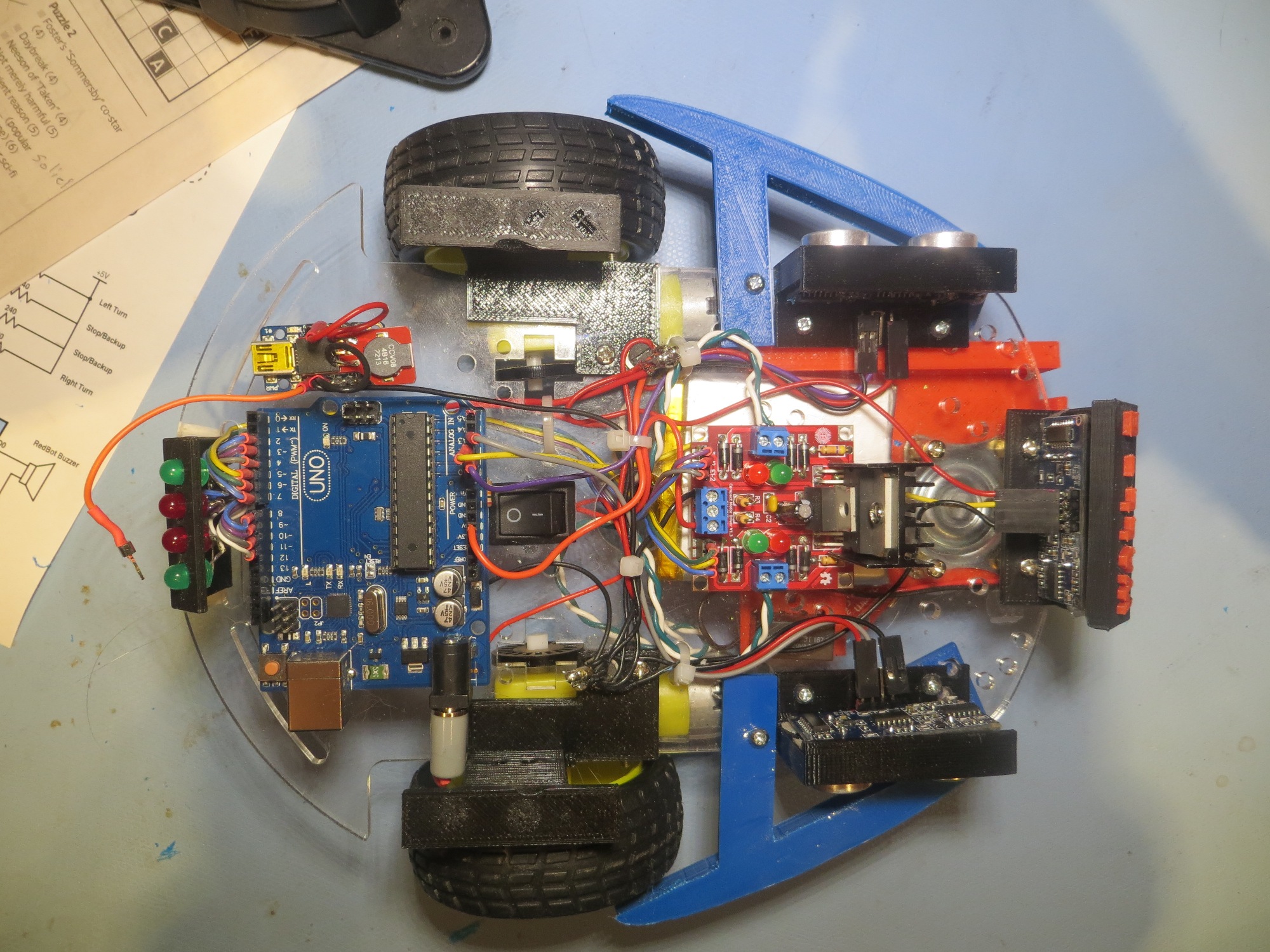
Top view of Baby’s new bumpers
At this point, Wall-E is starting to mature as an autonomous wall-following robot. There are still at least two significant problems that need to be addressed
- Wall-E still gets stuck – even with the new bumpers. Not as often, but still… I think I’ll need to develop a secondary ‘stuck state’ detection algorithm, maybe based on all three (left/right/forward) sensor distances remaining fixed for some period of time.
- The little plastic castering nose wheel collects lint and cat fur like crazy, and soon has enough stuff wound around its axle to make it more of a castering skid than a wheel. I don’t really have any good ideas about addressing this, short of replacing it with something else entirely. That will be a major PITA, as I built the charging platform around the nose wheel mount.
Stay tuned!
Frank